【備忘録】Navio2取得データをROSへ出力
1. 実行結果
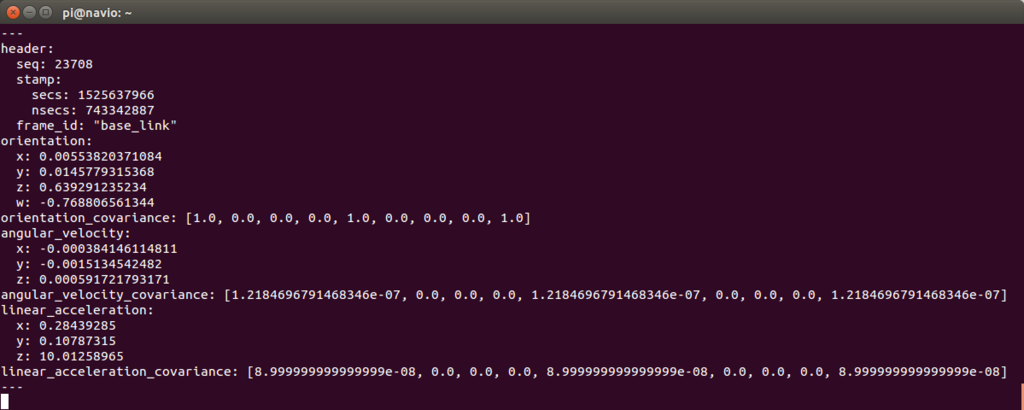
ROS上に出力されたIMUデータ
2. 手順
1) Raspberry PIにログイン
$ ssh pi@navio.local 初期ユーザー名:pi 初期パスワード:raspberry
2) ROSの起動
pi@navio: ~ $ roscore
3) Navio2(Ardupilot)の設定
pi@navio: ~ $ wget http://firmware.eu.ardupilot.org/Copter/stable/navio2/arducopter pi@navio: ~ $ chmod +x arducopter pi@navio: ~ $ sudo nano /etc/default/arducopter ファイルを開いた後、IPアドレス及びポートを次の通りに変更 TELEM1="-A udp:127.0.0.1:14650" pi@navio: ~ $ sudo systemctl start arducopter pi@navio: ~ $ sudo systemctl enable arducopter
3) ROSノードの設定
pi@navio: ~ $ rosrun mavros mavros_node \ _fcu_url:=udp://:14650@ \ _gcs_url:=udp://:14551@192.168.1.189:14550 pi@navio: ~ $ rosservice call /mavros/set_stream_rate 0 10 1 pi@navio: ~ $ rostopic echo /mavros/imu/data ⇒実行結果が表示される
3. 参考
1) Navio2
https://docs.emlid.com/navio2/common/dev/ros/
2) tmux
・コマンド入力後"$ tmux new -s session-name"にエラー発生"tmux: incalid LC_ALL, LC_CTYPE or LANG"
https://github.com/GameServerManagers/LinuxGSM/issues/817
https://webkaru.net/linux/debian-locales/
・tmuxの操作方法(Ctl+bとは?、設定ファイル)
https://teratail.com/questions/15200
https://github.com/tmux/tmux/issues/959
http://kanjuku-tomato.blogspot.be/2014/02/tmux.html
4. 今後やりたいこと
・ROS上に書き出したデータにPC上からアクセスし、データを読み込む
最後まで読んで頂き、ありがとうございました。